Researchers at the University of Cambridge have developed a robotic sensor that reads Braille twice as fast as a human. Through advanced machine learning algorithms, the robot sensor glides over the Braille text, achieving a reading speed of about 315 words per minute with close to 90% accuracy.
What does that mean?
This feat marks a major advance in the areas of tactile sensing and robotic dexterity.
Although the main focus of the robot’s development was not to assist the visually impaired in reading, its success in high-speed Braille reading highlighted the potential for improving the robot’s sensitivity.
Due to the need for improved tactile sensitivity, Braille serves as an exemplary test case for the development of robotic hands and prosthetic limbs that can emulate the sensitivity of human fingertips.
The research was led by Professor Fumiya Iida’s laboratory at the Faculty of Engineering at the University of Cambridge.
Perth Poddar, lead author of the study, emphasized the importance of the flexibility of human fingertips in order to grip objects with the right amount of pressure.
However, replicating this quality in a robotic hand poses significant engineering challenges, especially when dealing with flexible or deformable surfaces.
Why was Braille chosen as a testing ground?
The researchers chose Braille as their testing ground because it requires high tactile sensitivity.
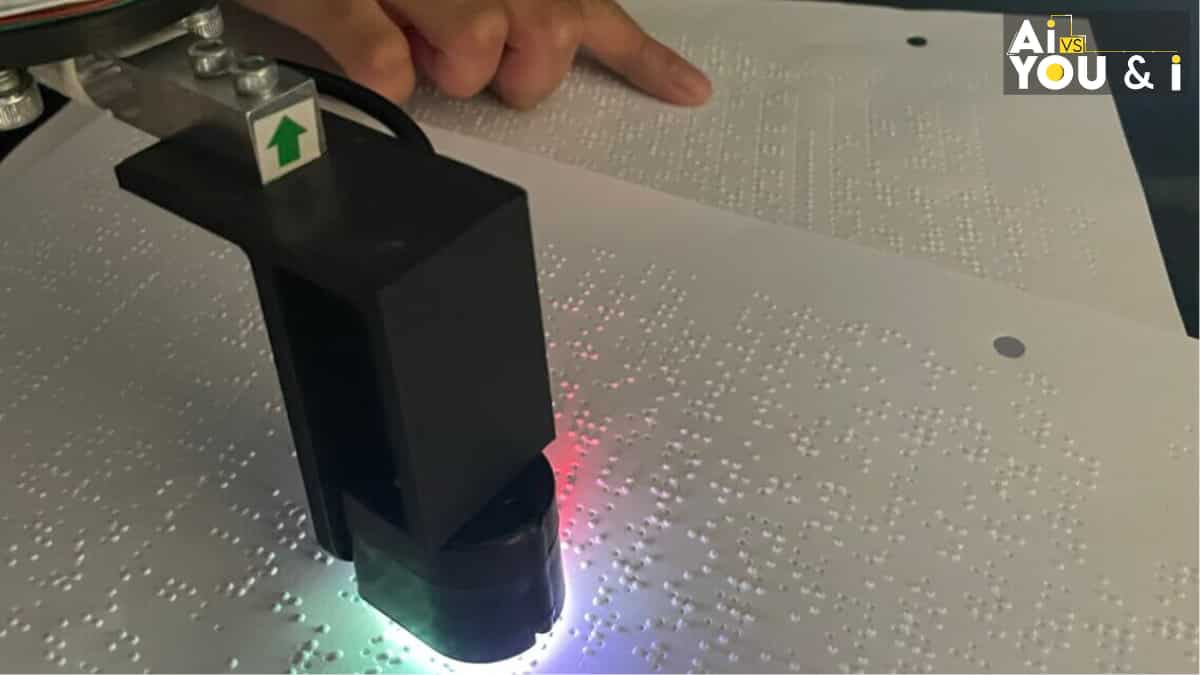
Unlike traditional robotic braille readers that operate character by character, the Cambridge team has developed a more efficient and realistic reading method.
A robot sensor with a camera in its “fingertips” uses a combination of visual and sensory information to read Braille.
See also | Visually impaired students in Malaysia learn Quran using Braille
The team also trained machine learning algorithms using blurred images of Braille to enhance the system’s character recognition.
This innovation goes beyond Braille reading and has far-reaching implications for robotic applications that require tactile sensing, such as texture detection and slip prevention during object manipulation.
The research results were published in the journal IEEE Robotics and Automation Letters.
 Arabic
Arabic Dutch
Dutch English
English French
French German
German Italian
Italian Portuguese
Portuguese Russian
Russian Spanish
Spanish